
去年春天测试无人矿卡的时候,遇到过一次定位漂移的事故。车在矿区道路上突然偏离了预定轨道,差点撞到路边的护栏。后来查日志才发现,是网关接收差分数据的时候出了问题,RTK定位直接退化成了普通GPS,精度从厘米级掉到了米级。
这事儿让我意识到,车载网关和高精度定位系统的配合,远比想象中重要。今天就聊聊这两个设备是怎么协同工作的。
为什么无人车必须要高精度定位
普通车载导航用的GPS定位,精度大概在5到10米。这对人类司机来说够用了,反正你看着路开,GPS只是个参考。但对无人车来说,这个精度根本不行。
想想看,一条标准车道宽3.75米,10米的定位误差意味着车可能在隔壁车道甚至路肩上。无人车必须知道自己在车道的哪个位置,误差不能超过10厘米,理想情况下要到5厘米以内。
这就需要RTK定位技术。RTK全称Real-Time Kinematic,实时动态差分定位。简单说就是通过地面基站发送差分改正数据,把GPS的定位精度从米级提升到厘米级。
目前主流的车规级RTK定位模块,像千寻位置的、六分科技的、北云科技的,标称精度都能达到水平方向2厘米、垂直方向5厘米。但这个精度不是随时都能达到的,它依赖一个关键条件:稳定接收差分数据。
这就是车载网关的活儿了。

差分数据是怎么传到车上的
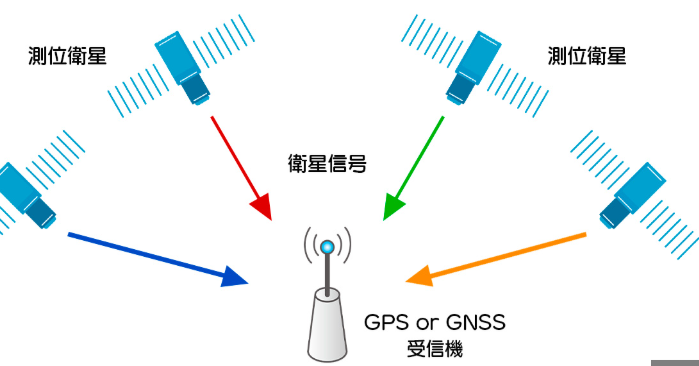
RTK定位的原理不复杂。地面上有固定的基准站,这些基准站知道自己的精确位置。它们同时接收GPS卫星信号,对比自己的真实位置和GPS测出来的位置,算出误差改正值。
这个误差改正值就是差分数据。基准站把差分数据广播出去,附近的移动设备收到后,用这个改正值来修正自己的GPS定位结果,精度就上去了。
关键问题是,怎么把差分数据传给车?
早期的方案是用专门的差分电台。基准站通过无线电台广播差分数据,车上装个电台接收机接收。这种方案现在还在用,尤其是矿区、港口这些封闭场景。优点是不依赖公网,缺点是覆盖范围有限,而且电台设备又贵又大。
现在更常见的方案是通过4G网络传输差分数据。这就需要车载网关出场了。
国内主流的做法是用千寻位置或者六分科技这些服务商。它们在全国建了几千个基准站,车载终端通过4G网络连接到云端服务器,服务器根据车的位置,选择最近的基准站,把差分数据推送下来。
整个链路是这样:基准站→云端服务器→4G网络→车载网关→RTK定位模块。
车载网关在这里干什么

有人可能会问,RTK定位模块自己不能联网吗,为什么要通过网关?
确实有些RTK模块集成了4G通信功能,可以直接连云端。但在无人车上,一般还是会走车载网关,原因有几个。
第一是统一管理车辆的所有对外通信。无人车上有十几个设备要联网,每个设备都插张SIM卡显然不现实。通过网关统一管理,一张卡解决所有设备的联网需求,还便于流量监控和控制。
第二是网络切换和冗余。车载网关通常配两张SIM卡,不同运营商。如果一个网络断了,可以自动切换到另一个。单个RTK模块做不到这个。
第三是数据处理和转发。差分数据从云端下来后,网关可以做一些预处理,比如格式转换、完整性校验、异常过滤。然后再转发给RTK模块。这样RTK模块只管定位本身,不用操心通信层的事。
第四是安全性。差分数据的传输需要加密和认证,防止被伪造或劫持。这些安全机制在网关层统一实现,比每个设备自己做要可靠。
从通信角度看,差分数据的传输其实挺简单。数据量很小,每秒几百字节到几KB,对带宽要求不高。但对实时性和可靠性要求高,断了就没法定位了。
实际应用中会遇到的问题
说起来简单,实际跑起来各种幺蛾子都有。

信号覆盖是第一个问题。城市里还好,4G信号基本无死角。但郊区、山区、隧道这些地方,信号时有时无。差分数据一断,RTK定位马上退化成普通GPS,精度掉下来。
我们测试的时候发现,在城市高架桥下面,信号经常被遮挡。还有密集的高层建筑区,信号虽然有但质量差,延迟高丢包多。这些场景下,定位精度会明显下降。
怎么办?最直接的办法是加备份方案。单纯靠4G网络不够稳定,可以加一套UHF差分电台作为备份。城市里用4G,到了信号不好的地方自动切换到电台。
有些项目会在特定区域部署自己的基准站。比如矿区、港口、园区,围墙里面信号覆盖不好,就在里面建几个基准站,通过专网或者WiFi把差分数据传给车。虽然建设成本高,但运营起来稳定性好。
延迟是第二个问题。差分数据对时效性要求很高。理论上从基准站采集到数据,到车上的RTK模块收到,整个延迟要控制在1秒以内,超过3秒数据就不太能用了。
我们遇到过一次,某个地方的4G网络延迟特别高,能到5-6秒。后来排查发现是那个区域的基站出口带宽打满了,所有数据都在排队。这种情况下,RTK精度会受影响,定位结果有时候会跳变。
解决办法是优化网络配置。跟运营商申请专用APN,给差分数据分配更高的QoS优先级。虽然数据量小,但优先级高,延迟就能降下来。
还有一个土办法,在车载网关里做预测算法。根据车的运动轨迹和历史差分数据,预测短时间内的差分值。如果网络延迟了,先用预测值顶着,等实际数据到了再修正。这个只能应急,长期还得靠网络质量。
完整性验证是第三个问题。差分数据如果在传输过程中出错或者被篡改,会导致定位结果完全错误。虽然概率很低,但无人车不能冒这个险。
千寻位置这些服务商,差分数据本身就带有校验和。网关收到数据后,要先验证校验和,确认数据完整才转发给RTK模块。如果校验失败,直接丢弃这条数据,不能让错误数据进入定位系统。
还要防止重放攻击。差分数据都带有时间戳,网关要检查时间戳是否在合理范围内。太老的数据说明可能是被重放的,要拒绝。
不同场景下的配置差异
无人车的应用场景差异很大,定位和通信的配置也不一样。
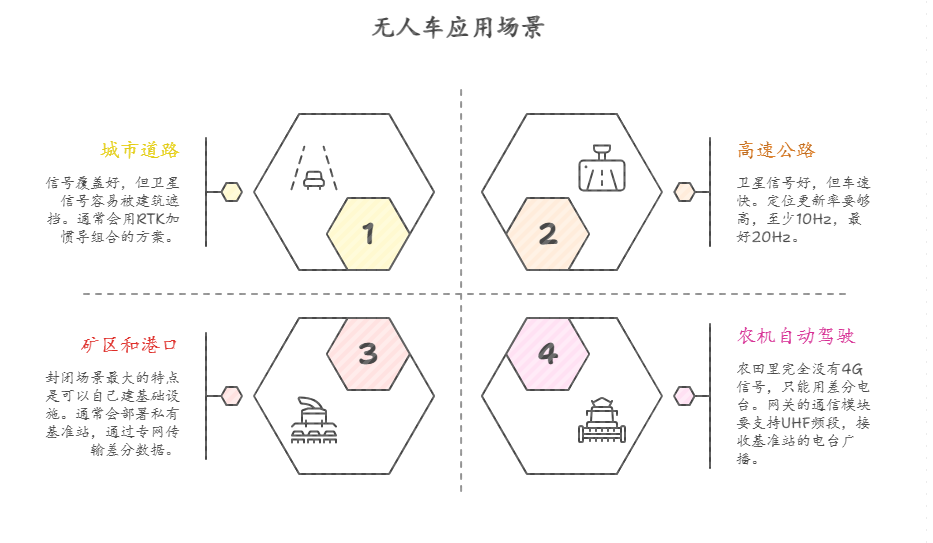
城市道路的robotaxi,这种场景信号覆盖好,但卫星信号容易被建筑遮挡。通常会用RTK加惯导组合的方案。4G网络接收差分数据没问题,但要配合高精度IMU,在卫星信号短时丢失时用惯导维持定位。
车载网关的配置相对简单,主要保证4G网络稳定连接到千寻或六分的服务器。但要注意流量管理,因为车队规模大,几百台车同时在线,流量费也是不小的开支。
高速公路场景,卫星信号好,但车速快。时速120公里,每秒移动33米。定位更新率要够高,至少10Hz,最好20Hz。这对通信实时性要求更高。
网关要配置低延迟模式,减少数据在网关内部的处理时间。有些网关支持硬件加速,把关键数据流用FPGA或者专用芯片处理,能把延迟降到几毫秒。
矿区和港口,这种封闭场景最大的特点是可以自己建基础设施。通常会部署私有基准站,通过专网传输差分数据,不依赖运营商网络。
车载网关需要支持多种通信方式。进矿区之前用4G,进入矿区后切换到WiFi或者UHF电台。切换要无缝,不能导致定位中断。有些网关支持双通信链路同时工作,一个主用一个备用,可靠性更高。
农机自动驾驶,这个场景比较特殊。农田里完全没有4G信号,只能用差分电台。网关的通信模块要支持UHF频段,接收基准站的电台广播。
但农机可能跨区域作业,不同区域的基准站频率不一样。网关要能根据GPS位置自动切换接收频率,或者同时监听多个频率,选择信号最强的。
RTK服务的成本考虑
用千寻位置或者六分科技的差分服务,是要付费的。通常按终端数量收费,每台车每年几百到一千多元不等。车队规模大了,这也是笔不小的开支。
有些企业会考虑自建差分系统。买几台基准站设备,自己架设和维护。初期投入大,一套基准站设备加上服务器,怎么也得几十万。但如果车队规模大,长期来看比买服务划算。
还有个中间方案,用开源的差分服务。国际上有些免费的CORS网络,提供差分数据。国内也有一些科研机构和地方政府建的免费服务。精度可能略差一点,但成本低。
从车载网关的角度,要支持多种差分数据格式和协议。除了千寻、六分这些商业服务的私有协议,还要支持标准的RTCM协议。这样可以兼容不同的差分源,根据项目需求灵活选择。
和其他定位手段的配合
实际应用中,RTK不是唯一的定位手段,通常会和其他技术组合使用。
RTK加IMU惯导是最常见的组合。IMU提供短时间内的高频定位输出,RTK提供长期的绝对位置基准。两者通过卡尔曼滤波融合,既有高精度又有高可靠性。
RTK加视觉定位也越来越常见。通过摄像头识别道路特征,和高精地图匹配,可以在RTK信号不好的时候提供辅助定位。这种方案下,车载网关不仅要传输差分数据,还要和云端的地图服务器通信,更新和下载地图数据。
RTK加激光雷达定位,用激光雷达扫描周围环境,和点云地图匹配。这个方案在隧道、地下车库这些GPS完全没信号的地方很有用。虽然不需要差分数据,但网关要负责点云地图的更新和同步。
从系统架构看,车载网关处于整个定位系统的通信中枢位置。它不仅传输差分数据,还可能要传输地图数据、点云数据、定位校准数据。这对网关的处理能力和带宽管理能力都提出了更高要求。
未来的发展方向
定位技术还在持续进化。
第一个趋势是多星座融合。现在的RTK系统不仅用GPS,还会同时用北斗、伽利略、GLONASS。多星座融合能提高定位精度和可靠性,尤其在城市峡谷这种卫星信号被遮挡的场景。
差分数据也要支持多星座。千寻位置现在提供的差分数据就包含了GPS和北斗的改正值。网关传输的数据量会增加,但精度和可靠性的提升是值得的。
第二个趋势是PPP-RTK技术。这是一种新的高精度定位技术,理论上可以做到全球覆盖,不依赖本地基准站。虽然还在发展中,但前景很好。对车载网关来说,可能要支持新的差分数据格式和传输协议。
第三个趋势是5G切片技术。5G网络可以为特定应用分配专用的网络切片,保证带宽和延迟。差分数据传输虽然数据量小,但对可靠性要求极高,很适合用5G切片。运营商也在推这个方向,未来可能会有专门面向车联网的5G切片服务。
第四个趋势是边缘计算。把差分数据的处理和分发放到边缘节点,减少云端到车辆的延迟。车载网关可以直接连接附近的边缘节点,获取差分数据。延迟能降到几十毫秒,比走云端要快得多。
总的来说,车载网关和高精度定位系统的配合,核心就是稳定可靠地传输差分数据。虽然数据量不大,但对实时性和可靠性要求极高。做好这件事需要从网络配置、协议设计、异常处理、备份机制等多个层面综合考虑。
技术在进步,但基本原理不会变。差分定位的本质就是用已知位置的基准站来校正卫星定位误差。只要理解了这个本质,无论技术怎么演进,都能找到正确的实现路径。



